

標定CT系統的參數
標定CT系統的參數
張常順1,崔尚2,鄭維連3,張振榮礦
(1.天津農學院水利工程學院:2.天津農學院計算機與信息工程學院:
3.天津農學院食品科學與生物工程學院:4.天津農學院基礎科學學院,天津300384)
摘要:本文計算CT系統探測器單元之間的距離,確定CT系統旋轉中心在正方形托盤中的位置,求出CT系統使用的X射線的180個方向。
關鍵詞:CT系統;探測器;旋轉中心
DOI:10.16 640/j.cnkl.37-1222/t.2018.10.185
CT系統安裝時往往存在誤差,從而影響成像質量,因此需要對安裝好的CT系統進行參數標定,即借助于已知結構的樣品(稱為模板)標定CT系統的參數,并據此對未知結構的樣品進行成像。
1 探測器單元之間的距離
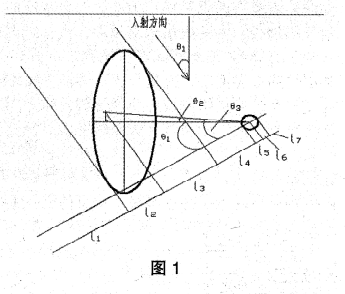
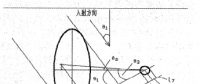
當光源從水平方向照射模板時,射線正好垂盲于橢圓的長軸穿過,如圖1所示。
此時穿過橢圓的射線條數在整個旋轉范圍中是最多的,所以有效數據最多且有效數據是連續的。通過對數據的分析查找,180列數據代表180次不同角度的掃措結果。通過查找水平射線對應的一組數據。
橢圓長軸的長度為80mm,將上面的數據帶入公式中可以得到探測器的總長=141.4214mm。由于探測器由512個單元組成,中間會有511個間距,所以探測器每兩個單元的間距為:le= 5111= 0.2768mm。2確定CT系統旋轉中心在正方形托盤中的位置
由于CT系統的的運動軌跡為繞一固定點旋轉的圓,所以可以通過圓上弦的兩條垂直平分線的交點求出旋轉中心在托盤的位置。首先選取射線垂直于橢圓長軸的水平方向照射時與平行于橢圓長軸的豎直方向照射時得兩種特殊的情況進行計算。
射線沿水平方向照射情況如圖1所示。此時穿過橢圓的射線條數在整個旋轉范圍中是最多的,所以有效數據最多且有效數據是連續的。所以得到的有效數據為第58列的a,b點對應的行數是:9:2,380。
然后進行旋轉中心在托盤上縱坐標的確定。因為CT系統光源與探測器的旋轉中心是固定不變的,所以旋轉中心單元點坐標為:(256.5,256.5)。橢圓的圓心位于長軸的中點所以橢圓圓心的單元點縱坐標為:237,圓心的單元點縱坐標與旌轉中心縱坐標之差為:19.5,然后根據上一問求出的單元點間距可得到正方形托盤上的縱坐標值,公式為:
M=0 -1256.5-Qolx/a (2)
最后求得:y =50+6.2729= 56.6729mm。
旋轉中心在托盤上橫坐標的確定(僅以橢圓為研究對象)。當光源平行于橢圓長軸照射時,射線正好垂直于橢圓的短軸穿過,此時穿過橢圓的有效數據最少。
通過分析,可知512個單元點中有效點的個數最少,所以我們確定了有效數據最少的一列是150列,且c,d點的對應行數是:169,276。 通過以上數據,我們可以知道橢圓圓心的單元點橫坐標是:223.5。 圓心的單元點橫坐標與旋轉中心橫坐標之差為:33,然后根據上一問求出的單元點間距可得到正方形托盤上的橫坐標值,公式為:
xl=l-1256,5-Q Ix/e (3)
最后求得:z= 50 - 9.2663= 40.7337mm。
所以,求得CT系統旋轉中心在正方形托盤中的位置為托盤中心左上方,坐標為: (-9.2663mm,6.2729mm)。
3 CT系統使用的X射線的180個方向
3.1 旋轉角度的確定
首先需要對CT系統旋轉的角度進行確定。將數據甩MATLAB進行動態擬合仿真,可以發現起始位量與終止位置的圖形是完全對稱的,由此可以判斷出CT系統一共旋轉了1806。 ,
3.2起始位置的確定
CT系統移動的起始位置數據可以由數據中的第一列數據來確定,其位置判斷方法如下:假設一束射線射入托盤其位置可以用入射平行光線與橢圓長軸的夾角8來確定(以長軸下方為正方向)。假設起始射線以與橢圓長軸成方向射入托盤中,在垂直于射線的直線上呈現出了一組數據如圖1:
上面已經求出了CT系統旋轉中心在托盤上的位置,其在數據中的位置為第256個數據點與257個數據點中間不變,小圓的圓心在投影上的位置也是不變的為第416個數據點。通過上面求出的兩單元點的間距0.2768,可以將數據統一為以mm為單位的距離量,求出兩點之間的距離與投影數據的距離的夾角03的三角函數:Cos03= 0.8115。
然后從圓心引出一條水平線9,與出旋轉中心到小圓中心的距離g2和旋轉中心引出的一條垂線g,相交構成一新的三角形,求出gi g2兩條—自線夾角島的三角函數:Co=0.9951。
求出島= 35.7573。,島- 6.111。最后求出夾角q=29.6463。即初始入射位置在橢圓長軸逆時針旋轉29.6463。處。
3.3旋轉問隔的距離
根據以上方法選取三組特殊數值進行驗算,分別為最終、光線水平與光線豎直四個特殊位置,最后得出結果夾角分別為89,917。、179.917。 、208.6360。
所以,由特殊點的數據可以判斷出:該CT系統旋轉180次一共旋轉180 9,并且X射線的第一個方向為橢圓長軸逆時針旋轉29.6463。的位置處。之后每過一個方向增加大約1。,第180個入射方向為208.6358。。
CT系統旋轉中心在正方形托盤中的位置(-9.2663mm,6.2729mm)。探測器單元之間的距離為0.2768mm。x射線的第一個方向為橢圓長軸逆時針旋轉29.6463。的位置處。之后每次逆時針旋轉大約1。,最后一個旋轉角度為208.6358。。
參考文獻:
[1]孔慧華,加速圖像重建的迭代算法研究[D].中北大學博士論丈,2006:5 -11.
[2]劉成龍,精通MATLAB圖像處理[M],北京:清華大學出版社,2 015.
[3]薛迎.基于sPs的TCT統計重建算法的研究[D].中北大學博士論文.2 012:8-9.
基金項目:天津農學院高校教師教育改革創新引導發展項目“高校數學教師創新創業教育能力的提升”(20170301)。為通訊作者

責任編輯:繼電保護







-

《電力設備管理》雜志讀者俱樂部會員招募
2018-10-16電力設備管理雜志 -

云南能源職業技術學院
2018-06-05云南能源職業技術學院 -

中國科學技術大學熱科學和能源工程系
