

電力隧道消防機器人的整體系統設計研究
電力隧道消防機器人的整體系統設計研究
夏湛然,楊秀友,田智
(國網武漢供電公司湖北 武漢430000)
[摘要]電力隧道消防機器人的設計應用,是開展電力隧道消防滅火救援,確保電力隧道消防安全,以及為電網安全穩定運行實現提供可靠保障的必要措施。結合電力隧道消防機器人設計應用實際情況,扶機械結構以及驅動、控制等層面,對電力隧道消防機器人的設計進行了研究分析,以促進其在實際中的應用實現。
關鍵詞 電力隧道 消防機器人 整體系統
中圖分類號 TM75
0引言
電力隧道的消防設計中,由于受到隧道的特殊性質影響,考慮到消防救援開展實際情況,一旦出現火災危害,采用普通的消防救援方式,不僅容易發生隧道堵塞,并且火災產生的濃煙與一般區域不同,不容易消散,救援開展困難比較突出。再加上受隧道通道形式影響,一般的消防設備以及人員進入救援也比較困難,容易造成較大的安全損失。近年來,隨著我國社會經濟與科學技術的不斷發展、進步,消防救援能力以及系統技術水平也不斷提升,對于隧道消防機器人的研究設計也相對較多,并且在實際救援過程中也有了應用實現。
1電力隧道的消防安全需求分析
由于電力隧道與其他空間的消防安全情況不同,電力隧道消防安全需求也有區別。一般情況下,電力隧道多用于具有較大容量的電力線路、電纜進行長距離電力傳輸,空間相對封閉,并且環境潮濕,再加上電方線路以及線纜本身可能存在的易燃特征,在燃燒過程中容易散發有害氣體等。因此,一旦電力隧道中發生某根電纜著災的情況,就會導致火勢順著電纜線路燃燒,并且在燃燒散發出較多的濃煙。再加上電纜線路的燃燒相對比較慢,火災危險度相對較高,對于分層或交叉電纜還可能會發生產生的安全威脅十分嚴重。 .
隧道的特殊性導致火災發生時的特點也不同,不僅空間較為封閉,不容易將燃燒釋放的熱量以及濃煙等散去,而且可能導致火勢嚴重,發展過快;其次,由于電力隧道的距離比較長,火災發生時人員疏散也還容易形成煙囪效益,導致火災傳播速度快,最后,受隧道結構形式影響,消防救援開展也比較困難。
2電力隧道消防機器人的設計分析
結合電力隧道消防安全需求以及消防機器人功能結構,其設計主要包括機械結構與驅動、控制三個部分。其中,機械結構中包括機器人的移動以及滅火執行等裝置配置,而驅動都分則以電力、液壓以及氣動驅動三種形式為主,結合實際情況進行設計應用。此外,還需要進行消防機器人控制系統設計實現,并結合消防救援需求進行有效的抗干擾設計,以滿足消防機器人開展救援的需求,在實際消防救援中應用實現。
2.1 機械結構設計分析
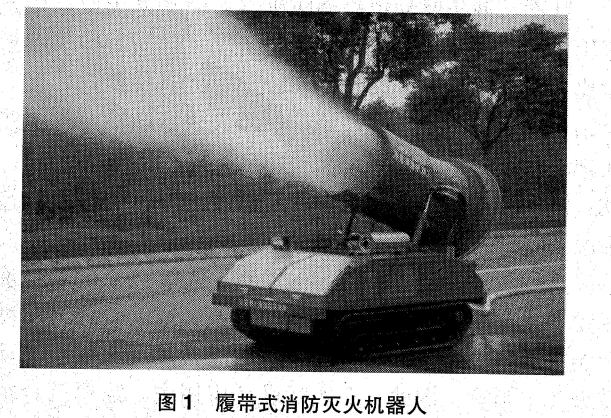
機械結構作為消防機器人整體系統的重要組成部分,對其設計性能以及結構功能都存在著重要的影響。根據消防救援情況,消防機器人機械結構設計主要包括消防機器人的移動裝置和滅火執行裝置配置。其中,在移動裝置配置設計中,當前國內外設計中比較常用的形式有多是步行樣式和輪式、履帶移動等不同結構形式,它們在實際應用中具有各自不同的特征優勢和局限性。考慮到隧道機器人開展消防救援時,隧道地面多不夠平坦,再加上電纜線路的交叉設計或分層設計等復雜情況,為確保電力隧道救援開展順利,多采用履帶移動形式作為消防機器人的移動裝置。圖1為采用履帶式移動的消防機器人示意圖。
其次,在進行消防機器人滅火執行裝置設計中,需要結合隧道火災特征,從消防滅火的有效性上進行設計。通常情況下,針對不同消防滅火需求的消防機器人,其滅火執行機構設置形式也不同,最常見的有粗筒和細管兩種結構形式。其中,細管形式的滅火執行機構主要應用在滅火噴射壓力需求較大的遠程滅火救援作業中;而粗筒式的滅火執行裝置則在排煙消防作業中應用比較多。這種結構形式能夠在救援過程中,通過較短的時間排出較多的滅火干粉,實現大面積煙霧吸排,確保消防救援效果。電力隧道火災發生時,空間封閉,濃煙聚集不容易散去,因此,隧道消防機器人多采用粗筒式的滅火執行裝置,以便于及時排除煙霧,控制火勢。
在進行消防機器人機械系統設計中,還應注意結合消防作業情況,因為消防作業過程中會受到火災高溫影響,形成較高的輻射與高溫氣流作用。這種情況下,為使消防機器人中各電子或電器設備裝置能夠正常運行,需要在機械設計中針對這一結構部分采取防輻射隔熱密封設置,對機器人系統進行保護。
2.2電力隧道消防機器人驅動設計
在消防機器人的整體系統中,驅動系統是確保機器人移動操作的重要動力。通常情況下,消防機器人驅動系統由動力源和減速器等結構裝置構成。其中,動力源根據驅動選擇的方式不同,其具體設計也存在著相應的差別。比較常見的消防機器人驅動方式有電動、氣動和液壓驅動等。
首先,以電動作為驅動的消防機器人設計多是通過電動機設備對減速器裝置進行帶動運行,從而實現機器人執行的驅動。這種驅動方式大多比較方便,并且效果好、性能相對較高,應用相對較多。值得注意的是,電動驅動形式在實際驅動應用中,作為消防機器人的驅動系統,需要與減速器之間進行相互配合才能達到較好的驅動效果,因此,進行該種形式的驅動系統設計就相對比較復雜。此外,在進行電動驅動的機器人驅動系統設計中,對于電動機的選擇使用需要結合實際情況,合理進行選擇,并且不同類型的電動機設備在工作運行中的驅動性能不同。
其次,液壓驅動也是消防機器人驅動系統設計中選擇應用較多的驅動形式之一。通常情況下,與其他驅動形式相比,液壓驅動由于設備體積較小,并且質量比較輕,因此結構相對緊湊,并且在消防機器人執行驅動過程中能夠實現較為平穩的運動,是其他驅動形式所不能滿足的。因此,液壓驅動結構在具有大轉矩或者是低速大轉矩的操作情況下,設計應用相對較多,這與液壓驅動裝置能夠實現平穩運行驅動的特征有很大的關系。需要注意的是液壓驅動形式主要以油液作為驅動動力源,所以受環境溫度的影響比較大。如果存在高溫作業情況,則會對液壓驅動的效果產生影響。因此,在實際設計應用中,需要結合情況慎重選擇。,
最后,消防機器入驅動系統設計中,氣動驅動也是一種比較常見的驅動形式。這種驅動形式是通過空氣壓縮機產生出只有較高壓力作用的氣體。這種氣體通過對其他操作執行結構的驅動控制來實現作業。氣動驅動形式在實際設計中的應用也比較多。這與氣動驅動形式的節能環保特征有很大關系,并且氣動驅動裝置的操作以及維護也比較方便。但是,由于氣動驅動實際操作中輸出功率較小,驅動控制作用力小,所以對于具有較高要求的消防作業,其適用性并不突出。
2.3控制系統設計
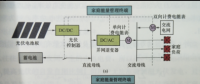
圖2為隧道消防機器人的控制系統結構示意圖。根據圖2可以看出,通常情況下,隧道消防機器人的控制系統設計主要包括硬件和軟件兩個部分。其中,硬件設計主要是進行控制器的選擇應用,根據控制器類型以及性能特點,選擇適用于隧道消防作業的設備,以確保其在消防作業過程中起到較好的控制作用。一般情況下,為確保控制器性能,隧道消防機器人多以工控機以及PLC作為控制器核心器件,同時結合其他功能需求,選擇相應的設備構件。此外,消防機器人的控制軟件設計應根據作業情況,通過作業任務描述以及部件構建、多代理情況描述以及端口對象動態配置、通信等結構功能設置,并通過分布式結構安排,建立能夠實現運行管理與控制的系統形式。
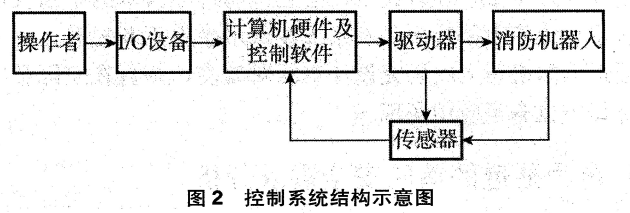
此外,消防機器人作業時,主要是通過探測報警傳感控制器對火災進行準確感知和消防作業執行,因此,火災報警傳感器也是消防機器人系統設計中的重要一部分。整個控制系統采用計算機對機器人工作運行進行控制,并通過控制系統輸出或輸入電纜信息傳輸的屏蔽設置,來對其操作安全性進行保護。
3結語
總之,對消防機器人整體系統的設計實現進行研究分析,有利于促進其在電力隧道消防中的設計應用,并為電力隧道消防安全提供可靠保障,具有積極的價值意義。
參考文獻
[1]高軼.電力電纜隧道消防技術方案分析[J].電力與能源, 2013,34(5):547-552.
[2]黨海昌.消防機器人在我國滅火救援中的應用現狀和前景分析[J].消防技術與產品信息,2016(3):69-71.
[3]史強,李露,邱自學,懸吊式高空消防機器人的設計及姿態控制原理[J].機械設計與制造,2012(12):162-164.

責任編輯:繼電保護











-

云南能源職業技術學院
2018-06-05云南能源職業技術學院 -

中國科學技術大學熱科學和能源工程系
-

重慶能源職業學院
2018-06-05重慶能源職業學院
