高端訪談 對(duì)話售電公司高管")

【干貨】太陽(yáng)能電池的運(yùn)動(dòng)跟蹤法
太陽(yáng)能電池跟蹤的機(jī)械部件
太陽(yáng)能電池的太陽(yáng)方位跟蹤是在太陽(yáng)有效光照時(shí)間內(nèi),能使太陽(yáng)光線始終垂直照射到光線采集器( 太陽(yáng)能集熱器或光電池) 的采集面上,使光線采集器在有效光照時(shí)間內(nèi)都能最大限度地獲取太陽(yáng)能的系統(tǒng)。該系統(tǒng)的最主要部分通常由控制部件和轉(zhuǎn)動(dòng)部件組成。
電池板的轉(zhuǎn)動(dòng)部件就是其運(yùn)動(dòng)機(jī)構(gòu),是一套機(jī)械構(gòu)件,太陽(yáng)能電池板的跟蹤是繞特定轉(zhuǎn)軸轉(zhuǎn)動(dòng),轉(zhuǎn)軸是運(yùn)動(dòng)的參考部件,所以太陽(yáng)能電池板的跟蹤運(yùn)動(dòng)方式是以軸系的組成來(lái)分類的,分成單軸跟蹤與雙軸跟蹤兩類。單軸跟蹤分為平單軸跟蹤與斜單軸跟蹤;雙軸跟蹤也分成兩類:極軸式跟蹤系統(tǒng)(赤道坐標(biāo)系雙軸跟蹤)與高度角-方位角跟蹤(地平坐標(biāo)系雙軸跟蹤)系統(tǒng),這些跟蹤方式在相應(yīng)課件已做介紹,這里不再做介紹。
電池板繞軸轉(zhuǎn)動(dòng)是由電動(dòng)機(jī)驅(qū)動(dòng)的,驅(qū)動(dòng)電機(jī)可以是步進(jìn)電機(jī)或普通電機(jī),電機(jī)需要通過(guò)齒輪減速器來(lái)帶動(dòng)電池板轉(zhuǎn)動(dòng),多種驅(qū)動(dòng)電機(jī)包含齒輪減速器。驅(qū)動(dòng)電機(jī)最好帶輸出角度檢測(cè),以便計(jì)算機(jī)知道電池板的轉(zhuǎn)動(dòng)位置。輸出角度檢測(cè)對(duì)于開(kāi)環(huán)控制是必不可少的,而且要有足夠精度。
太陽(yáng)能電池的視日運(yùn)動(dòng)跟蹤法
電池板的控制系統(tǒng)根據(jù)控制方式分為三種:視日運(yùn)動(dòng)跟蹤法、光電跟蹤法、混合控制法。
視日運(yùn)動(dòng)跟蹤法是一種主動(dòng)式跟蹤,主要有地平坐標(biāo)系跟蹤與赤道坐標(biāo)系跟蹤。
地平坐標(biāo)系雙軸跟蹤
主動(dòng)式跟蹤控制根據(jù)控制計(jì)算機(jī)預(yù)先存儲(chǔ)的當(dāng)?shù)亟?jīng)緯度等數(shù)據(jù)與太陽(yáng)運(yùn)動(dòng)的軌跡函數(shù),再根據(jù)實(shí)時(shí)時(shí)鐘的精確時(shí)間信號(hào),按地平坐標(biāo)系相關(guān)函數(shù)計(jì)算出實(shí)時(shí)的太陽(yáng)高度角與方位角,發(fā)出控制信號(hào)。電池板的軸系驅(qū)動(dòng)部件根據(jù)這些信號(hào)把電池板轉(zhuǎn)向指定的高度角與方位角,從而對(duì)準(zhǔn)太陽(yáng)。在整個(gè)控制過(guò)程中無(wú)需檢測(cè)電池板是否對(duì)準(zhǔn)了太陽(yáng),直接發(fā)控制命令,所以是主動(dòng)式控制。由于控制過(guò)程不檢測(cè)太陽(yáng)位置,不是根據(jù)檢測(cè)到的太陽(yáng)位置偏差進(jìn)行控制的,在自動(dòng)控制技術(shù)中稱為開(kāi)環(huán)控制。
這種直接輸出太陽(yáng)高度角與方位角信號(hào)進(jìn)行跟蹤控制的方法稱為高度角和方位角雙軸跟蹤或地平坐標(biāo)系雙軸跟蹤。圖1是其控制框圖。
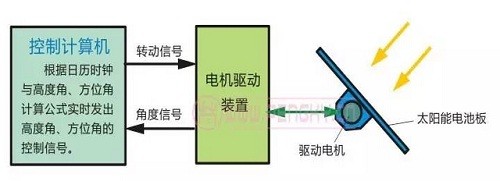
圖1--高度角和方位角雙軸跟蹤主動(dòng)式控制框圖
由于控制過(guò)程不檢測(cè)電池板的轉(zhuǎn)動(dòng)位置與太陽(yáng)位置是否有偏差,為了保證電池板的轉(zhuǎn)動(dòng)的機(jī)械位置正確就必須保證整個(gè)驅(qū)動(dòng)裝置與執(zhí)行電機(jī)有較高的精度。對(duì)于高精度跟蹤的聚光太陽(yáng)能系統(tǒng)可采用步進(jìn)電機(jī)帶動(dòng)電池板,為防止失步或其他誤動(dòng)作,還必須有精密的機(jī)械位置檢測(cè)傳感器,把信號(hào)實(shí)時(shí)反饋給計(jì)算機(jī)檢查位置是否正確,若有偏差就及時(shí)修正;采用普通伺服電機(jī)就必須配機(jī)械位置檢測(cè)傳感器構(gòu)成局部的閉環(huán)控制,保證運(yùn)行精度。在圖1中的角度信號(hào)箭頭線就是從位置檢測(cè)傳感器來(lái)的反饋信號(hào)。
赤道坐標(biāo)系雙軸跟蹤
在極軸式跟蹤系統(tǒng)也可以采用主動(dòng)式跟蹤控制,只是計(jì)算機(jī)的數(shù)據(jù)是按赤道坐標(biāo)系處理。根據(jù)控制計(jì)算機(jī)預(yù)先存儲(chǔ)的當(dāng)?shù)亟?jīng)緯度等數(shù)據(jù)與太陽(yáng)運(yùn)動(dòng)的軌跡函數(shù),再根據(jù)實(shí)時(shí)時(shí)鐘的精確時(shí)間信號(hào),計(jì)算出實(shí)時(shí)的太陽(yáng)繞極軸轉(zhuǎn)動(dòng)的角度(時(shí)角),發(fā)出控制信號(hào),使電池板對(duì)準(zhǔn)太陽(yáng)。由于俯仰角變化很小,每日不超過(guò)0.5度,可每日或幾日計(jì)算一次俯仰角度,調(diào)整電池板的俯仰角度。圖2是其控制框圖。
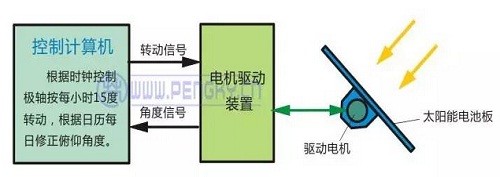
圖2--極軸雙軸跟蹤主動(dòng)式控制框圖
同樣為保證跟蹤的準(zhǔn)確性,要有電池板軸轉(zhuǎn)動(dòng)的角度檢測(cè)傳感器把角度信號(hào)反饋給計(jì)算機(jī)。
主動(dòng)式控制也適合于單軸跟蹤系統(tǒng),其計(jì)算函數(shù)非常簡(jiǎn)單,對(duì)于極軸式跟蹤可直接定時(shí)轉(zhuǎn)動(dòng)一定角度即可,保證每小時(shí)轉(zhuǎn)動(dòng)15度。
開(kāi)環(huán)控制沒(méi)有跟蹤太陽(yáng)的傳感器,為保證電池板轉(zhuǎn)動(dòng)精度,必須有兩個(gè)軸轉(zhuǎn)動(dòng)的角度檢測(cè)傳感器,把角度信號(hào)反回計(jì)算機(jī),檢測(cè)是否出現(xiàn)錯(cuò)誤的角度,以便及時(shí)處理。對(duì)于要求高的聚光太陽(yáng)能電池跟蹤,需提高軸系機(jī)械精度與角度檢測(cè)精度,從而增加了制造成本。
太陽(yáng)能電池的光電跟蹤法
光電跟蹤法是一種被動(dòng)式跟蹤,控制計(jì)算機(jī)根據(jù)太陽(yáng)光跟蹤傳感器反饋的信號(hào)計(jì)算出電池板位置與太陽(yáng)位置間的偏差方向與角度,再根據(jù)偏差發(fā)出控制信號(hào)。電池板的軸系驅(qū)動(dòng)部件根據(jù)控制信號(hào)把電池板對(duì)準(zhǔn)太陽(yáng),直到偏差最小。在整個(gè)控制過(guò)程中需不停的檢測(cè)電池板的具體狀態(tài)數(shù)據(jù),再計(jì)算發(fā)出控制命令,在自動(dòng)控制技術(shù)中稱為閉環(huán)控制。圖3是光電跟蹤控制框圖。
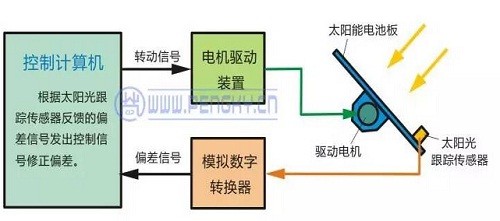
圖3--太陽(yáng)能電池板光電跟蹤控制框圖
被動(dòng)跟蹤需通過(guò)太陽(yáng)光跟蹤傳感器實(shí)時(shí)采集電池板方位與太陽(yáng)方向間的誤差信號(hào),在多云和陰天環(huán)境下會(huì)出現(xiàn)無(wú)法跟蹤的問(wèn)題。此外,由于光敏傳感器處在室外環(huán)境中,傳感器易受灰塵、積雪等因素的影響,導(dǎo)致所提供的跟蹤信號(hào)不穩(wěn)定。
太陽(yáng)能電池跟蹤的混合控制法
混合控制法就是把視日運(yùn)動(dòng)跟蹤法與光電跟蹤法結(jié)合使用。一般來(lái)說(shuō)以光電跟蹤為主,以視日運(yùn)動(dòng)跟蹤來(lái)解決因天氣等因素造成無(wú)法跟蹤的問(wèn)題。也可以先通過(guò)視日運(yùn)動(dòng)軌跡跟蹤進(jìn)行粗跟蹤, 再由光電傳感器跟蹤進(jìn)行精跟蹤, 從而提高跟蹤精度。對(duì)于跟蹤控制精度要求高的聚光型太陽(yáng)能電池要采用混合控制法。
由于系統(tǒng)的精確跟蹤還是依賴光電跟蹤,故對(duì)跟蹤軸系的制造精度與角度檢測(cè)精度要求不高,不會(huì)明顯提高制造成本。
采用計(jì)算機(jī)進(jìn)行跟蹤控制是根據(jù)時(shí)鐘信號(hào)或采集的太陽(yáng)光跟蹤傳感器信號(hào)進(jìn)行計(jì)算處理的,對(duì)于跟蹤控制精度要求高的系統(tǒng)可10余秒計(jì)算處理一次,發(fā)出電池板的轉(zhuǎn)動(dòng)信號(hào),間歇驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。對(duì)于平面的太陽(yáng)能電池板則不需要那么高的跟蹤精度,差幾度影響不大,為節(jié)省能源,減少機(jī)械磨損,可數(shù)分鐘計(jì)算處理一次,發(fā)控制信號(hào)一次。
官方微信售電那點(diǎn)事兒")
責(zé)任編輯:蔣桂云
- 相關(guān)閱讀
- 火力發(fā)電
- 風(fēng)力發(fā)電
- 水力發(fā)電
- 光伏太陽(yáng)能
-

26億!杭州垃圾焚燒項(xiàng)目塵埃落定 準(zhǔn)DBO引關(guān)注
-

【科普】什么是薄膜發(fā)電?
-

技術(shù)|垃圾焚燒發(fā)電小知識(shí)——污染物控制技術(shù)
-
26億!杭州垃圾焚燒項(xiàng)目塵埃落定 準(zhǔn)DBO引關(guān)注
-
技術(shù)|垃圾焚燒發(fā)電小知識(shí)——污染物控制技術(shù)
-

中國(guó)“智”造照亮越南 打造花園電廠